|
llvm-mos-sdk
|
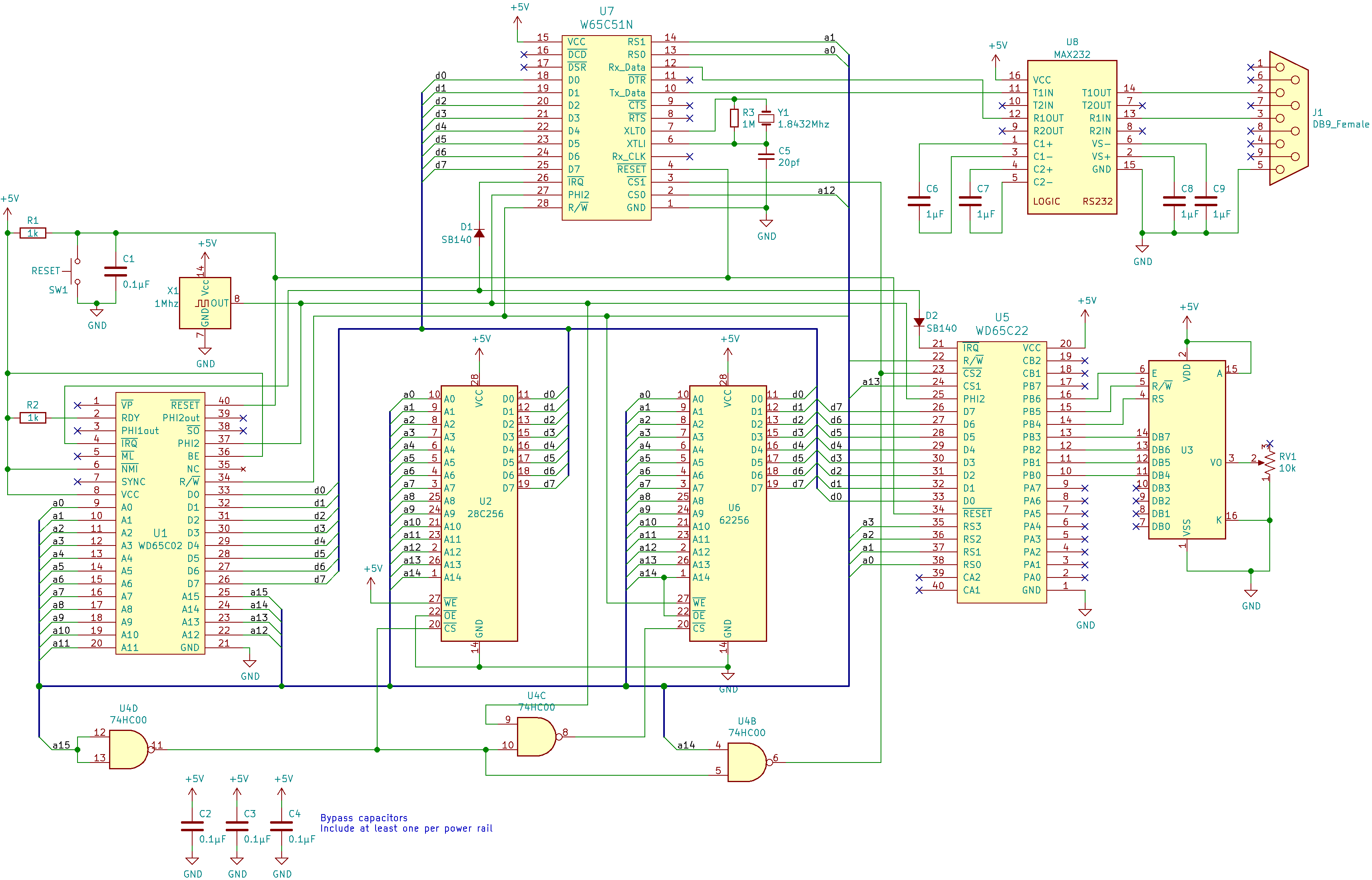
This directory contains support for Ben Eater's Breadboard 6502 project.
This port has the following features:
The W65C51N Asynchronous Communications Interface Adapter (ACIA) at address $5000 in the breadboard's memory map is used to implement the __putchar() and __getchar() functions for the C library.
The ACIA is configured for 19200 bps N-8-1 communications and RTS handshaking. The handshaking lines on the W65C51N should be hooked up as follows:
Serial output uses busy-waiting after transmitting each character, due to bugs in the W65C51N chip.
Interrupts and RTS handshaking are used to reduce the chance of missing incoming characters. A 256-byte buffer is used to hold incoming data until it can be read. If the buffer fills up, then RTS will be disabled and communications with the host will stop until the program starts reading bytes again with getchar().
The system tick counter can be read by program code with the millis() function:
unsigned long millis(void);
The counter starts at zero at startup time and increments every millisecond. The value will wrap around after 49.7 days.
The millis() function is intended for implementing timeouts and delays without using hard-coded delay loops. The built-in delay() function makes it easy to introduce a simple delay up to 65535 milliseconds into your program:
void delay(unsigned ms);
The crt0 code takes care of serial and system tick interrupts automatically. After the standard interrupt sources have been handled, the crt0 code will call the irq() function, which must be declared as follows:
__attribute__((interrupt)) void irq(void)
{
...
}
Non-maskable interrupts can also be handled if the program declares the nmi() function as follows:
__attribute__((interrupt)) void nmi(void)
{
...
}
The linker script provides stub definitions for irq() and nmi() in case you don't need them.
{kind=link}